歡迎来(lái)到河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司网(wǎng)站!
河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司專注四(sì)輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置檢測儀器設備研發(fà)
輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置") 咨詢热(rè)線(xiàn):400-0306-998
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
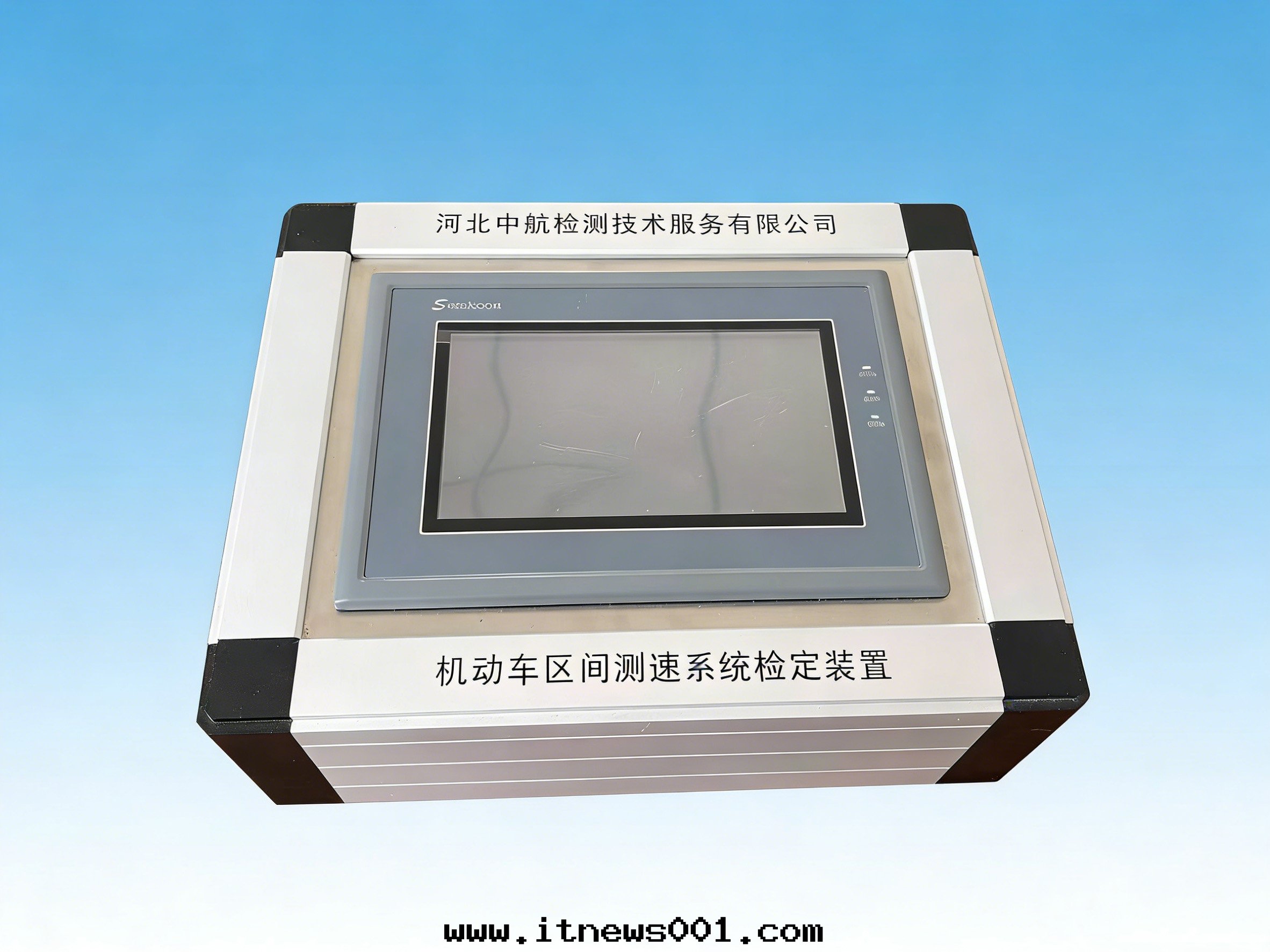
ZH-QJ型區(qū)间測速系(xì)統檢定(dìng)裝(zhuāng)置
ZH-QJ型區(qū)间測速系(xì)統檢定(dìng)裝(zhuāng)置以(yǐ)GPS+激光(guāng)多(duō)普勒为(wèi)測速、測距單元(yuán)的(de)智能(néng)化(huà)測试儀器,用(yòng)以(yǐ)測试汽車的(de)瞬时(shí)運動(dòng)速度(dù)以(yǐ)及(jí)行駛距離,配合外(wài)部(bù)高(gāo)亮(liàng)度(dù)LED電(diàn)子屏,可(kě)以(yǐ)对(duì)區(qū)间測速監測系(xì)統等多(duō)種(zhǒng)測速裝(zhuāng)置進(jìn)行現(xiàn)场測试标(biāo)定(dìng)。符合《道(dào)路(lù)交通(tòng)區(qū)间測速監測系(xì)統》的(de)檢定(dìng)要(yào)求。
主(zhǔ)機(jī)采用(yòng)大(dà)屏液晶實(shí)时(shí)顯示多(duō)項測试數據(jù),清晰直(zhí)觀。外(wài)部(bù)高(gāo)亮(liàng)度(dù)電(diàn)子屏可(kě)同(tóng)屏顯示标(biāo)準时(shí)间(或(huò)行駛时(shí)间值)和(hé)行駛距離值或(huò)者(zhě)速度(dù)值,整機(jī)設計(jì)簡單易用(yòng),便于操控,是(shì)高(gāo)速公(gōng)路(lù)管(guǎn)理(lǐ)部(bù)門(mén),計(jì)量(liàng)院(yuàn),科研部(bù)門(mén)的(de)理(lǐ)想(xiǎng)檢測設備。
|
機(jī)動(dòng)車區(qū)间測速監控系(xì)統檢定(dìng)裝(zhuāng)置 型号(hào):ZH-QJ 符合JJG 527-2015《固定(dìng)式機(jī)動(dòng)車雷(léi)达(dá)測速儀檢定(dìng)規程》 JJG528-2015《移動(dòng)式機(jī)動(dòng)車雷(léi)达(dá)測速儀檢定(dìng)規程》 JJF(川(chuān))109-2013《道(dào)路(lù)交通(tòng)區(qū)间車速監測系(xì)統校(xiào)準規範》 |
|||||
|
序号(hào) |
标(biāo)準器名(míng)稱 |
測量(liàng)範圍 |
精度(dù)等級或(huò) 不(bù)确定(dìng)度(dù) |
數量(liàng) |
備注 |
|
1 |
區(qū)间測速系(xì)統主(zhǔ)機(jī) |
速度(dù)(1~200)km/h |
MPE:±0.1% |
1套(tào) |
/ |
|
距離1~99999.99米 |
MPE:±0.2% |
||||
|
时(shí)间:衛星(xīng)同(tóng)步,顯示时(shí)分(fēn)秒(miǎo) |
當前(qián)时(shí)刻誤差:±0.1s,日(rì) 差:±0.1s/d |
||||
|
2 |
多(duō)參數静(jìng)态LED電(diàn)子屏 |
7位(wèi)或(huò)双(shuāng)排14位(wèi)顯示 |
/ |
1套(tào) |
|
|
3 |
TF卡(kǎ) |
64G |
|
1张(zhāng) |
|
ZH-ONE-2激光(guāng)測速傳感(gǎn)器
産品介紹:
ZH-ONE-2型激光(guāng)測速傳感(gǎn)器,是(shì)采用(yòng)激光(guāng)多(duō)普勒效應(yìng)非(fēi)接觸測量(liàng)物(wù)體(tǐ)速度(dù)和(hé)距離的(de)高(gāo)精度(dù)傳感(gǎn)器。它(tā)适合于計(jì)量(liàng)校(xiào)準測试及(jí)工業生(shēng)産领域。采用(yòng)激光(guāng)非(fēi)接觸測量(liàng)速度(dù),解(jiě)决了(le)GPS傳感(gǎn)器隧道(dào)內(nèi)信号(hào)丢失的(de)問(wèn)题。 ZH-ONE-2 使用(yòng)了(le)先進(jìn)的(de)數字信号(hào)處(chù)理(lǐ)器,采用(yòng)了(le)獨特(tè)的(de)分(fēn)析技 術(shù)和(hé)算法(fǎ)。使得用(yòng)戶能(néng)夠灵活配置和(hé)調整各種(zhǒng)儀表(biǎo)參數以(yǐ)适應(yìng)其(qí)需要(yào)。 ZH-ONE-2具有(yǒu)多(duō)種(zhǒng)輸出(chū)接口(kǒu)和(hé)系(xì)統輸入(rù)接口(kǒu)。激光(guāng)測速傳 感(gǎn)器在(zài)出(chū)厂前(qián)進(jìn)行标(biāo)定(dìng)測试,可(kě)以(yǐ)通(tòng)过(guò)調试软(ruǎn)件(jiàn)設置各種(zhǒng)參數。该 激光(guāng)測速傳感(gǎn)器可(kě)以(yǐ)單獨使用(yòng)也(yě)可(kě)以(yǐ)給(gěi)工控系(xì)統提(tí)供閉环(huán)控制信号(hào)。
技術(shù)參數:
|
序号(hào) |
應(yìng)用(yòng) |
技術(shù)參數 |
|
|
1 |
應(yìng)用(yòng)领域 |
車载(zài)測速 |
|
|
2 |
産品型号(hào) |
ZH-ONE-2 |
|
|
3 |
測量(liàng)範圍 |
0-180km/h |
|
|
4 |
速度(dù)測量(liàng)精度(dù) |
≤±0.2% |
|
|
5 |
速度(dù)重(zhòng)複性(xìng) |
≤±0.05% |
|
|
6 |
距離測量(liàng)範圍 |
0-99999.9米,分(fēn)辨力:0.1m |
|
|
7 |
距離測量(liàng)精度(dù) |
≤±0.5% |
|
|
8 |
工作(zuò)温度(dù) |
-20-40℃ |
|
|
9 |
供電(diàn) |
24VDC±5%,功率≤35W |
|
|
10
|
激光(guāng)器
|
Laser 3B ,激光(guāng)功率≤30mw |
|
|
11 |
接口(kǒu)
|
調试串口(kǒu) |
RS232(用(yòng)于修改參數和(hé)調试) |
|
用(yòng)戶串口(kǒu) |
RS232(輸出(chū)速度(dù)和(hé)距離) |
||
|
脈沖輸出(chū) |
5VTTL |
||
産品原理(lǐ)簡介:
ZH-ONE-2 是(shì)一(yī)種(zhǒng)表(biǎo)面(miàn)激光(guāng)測速儀,用(yòng)激光(guāng)多(duō)普勒原理(lǐ)来(lái)測量(liàng)運動(dòng)物(wù)體(tǐ) 的(de)表(biǎo)面(miàn)速度(dù)和(hé)距離。 激光(guāng)束(shù)被(bèi)分(fēn)光(guāng)器分(fēn)成(chéng)两(liǎng)束(shù)光(guāng)。在(zài)工作(zuò)距離两(liǎng)个光(guāng)束(shù)相交産生(shēng)干(gàn)涉条(tiáo)紋。當 運動(dòng)物(wù)體(tǐ)通(tòng)过(guò)此(cǐ)光(guāng)斑區(qū)域时(shí),産生(shēng)散(sàn)射光(guāng),一(yī)个光(guāng)接收(shōu)器收(shōu)集散(sàn)射光(guāng)並(bìng)将其(qí) 轉(zhuǎn)換为(wèi)電(diàn)信号(hào),这(zhè)个信号(hào)包(bāo)含運動(dòng)目标(biāo)的(de)速度(dù)信息,此(cǐ)信息由(yóu)數字信号(hào)處(chù)理(lǐ) 器進(jìn)行分(fēn)析,就(jiù)把(bǎ)多(duō)普勒頻率信息轉(zhuǎn)換成(chéng)速度(dù)信息。在(zài)智能(néng)滤波(bō)算法(fǎ)对(duì)信号(hào) 進(jìn)行轉(zhuǎn)換運算後(hòu),激光(guāng)測速儀實(shí)时(shí)輸出(chū)用(yòng)戶所(suǒ)需要(yào)的(de)速度(dù)信息。根(gēn)據(jù)檢測到 的(de)反(fǎn)射激光(guāng)的(de)強(qiáng)度(dù),可(kě)以(yǐ)判斷輸出(chū)被(bèi)測物(wù)的(de)有(yǒu)無。
儀器特(tè)點(diǎn):
与傳統的(de)接觸式速度(dù)計(jì)相比
1.無需接觸被(bèi)測物(wù)體(tǐ),避免对(duì)物(wù)體(tǐ)的(de)影響和(hé)損壞;
2.高(gāo)精度(dù)、高(gāo)可(kě)靠性(xìng),測量(liàng)結果(guǒ)準确可(kě)靠;
3.易于操作(zuò),不(bù)需要(yào)太多(duō)的(de)技術(shù)知識和(hé)經(jīng)验(yàn);
4.可(kě)以(yǐ)記(jì)录並(bìng)輸出(chū)多(duō)種(zhǒng)參數數據(jù),方(fāng)便進(jìn)行數據(jù)分(fēn)析和(hé)研究;
5.适應(yìng)各種(zhǒng)路(lù)面(miàn)檢測,抗光(guāng)線(xiàn)干(gàn)擾能(néng)力強(qiáng)。
ZH-ONE-2是(shì)一(yī)種(zhǒng)具有(yǒu)高(gāo)精度(dù)、高(gāo)可(kě)靠性(xìng)、易操作(zuò)等特(tè)點(diǎn)的(de)專業儀器,可(kě)以(yǐ)廣泛應(yìng)用(yòng)于計(jì)量(liàng)、科研等多(duō)个领域,並(bìng)为(wèi)相關(guān)行業的(de)生(shēng)産和(hé)研究提(tí)供了(le)可(kě)靠的(de)技術(shù)支持(chí)和(hé)數據(jù)支持(chí)。
電(diàn)話(huà):400-0306-998 / 手(shǒu)機(jī):13623116982 QQ:2813053603 / 傳真(zhēn):0319-3900063 邮箱(xiāng):hbzhjc666@126.com 地(dì)址:河北(běi)省(shěng)邢台(tái)市(shì)邢東(dōng)新(xīn)區(qū)遠(yuǎn)航路(lù)266号(hào)慧朋高(gāo)新(xīn)智造港24号(hào)樓1單元(yuán) 備案(àn)号(hào):冀ICP備17017554号(hào)-4

線(xiàn)客服(fú)") 在(zài)線(xiàn)客服(fú)
在(zài)線(xiàn)客服(fú)
衆号(hào)二(èr)维码") 公(gōng)衆号(hào)二(èr)维码
公(gōng)衆号(hào)二(èr)维码