欢迎来(lái)到(dào)河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司网(wǎng)站!
河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司專注四(sì)輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置檢測儀器设備研發(fà)
輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置") 咨詢热(rè)線(xiàn):400-0306-998
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
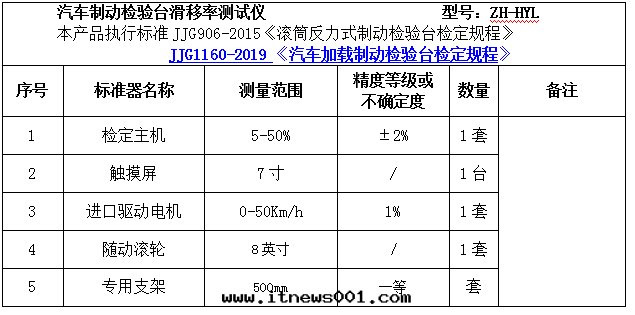
设備簡介:制動(dòng)測試台(tái)滑移率測試儀,通(tòng)过(guò)设置靠輪磁座和(hé)带(dài)動(dòng)輪,对(duì)制動(dòng)測試台(tái)的(de)滑移率進(jìn)行測試时(shí),控制器傳输信(xìn)号(hào)給(gěi)電(diàn)機(jī)以(yǐ)測得的(de)初始(shǐ)速度(dù)驅動(dòng)带(dài)動(dòng)輪,再制動(dòng)與(yǔ)減速,带(dài)動(dòng)輪勻減速後(hòu)的(de)速度(dù)數據(jù)傳输給(gěi)控制器,在(zài)驅動(dòng)電(diàn)機(jī)自(zì)動(dòng)停機(jī)瞬間(jiān),主(zhǔ)滾筒線(xiàn)速度(dù)與(yǔ)第三(sān)滾筒的(de)線(xiàn)速度(dù)之(zhī)差與(yǔ)主(zhǔ)滾筒線(xiàn)速度(dù)的(de)百(bǎi)分比則得出(chū)了(le)制動(dòng)測試台(tái)滑移率,增加了(le)測試台(tái)的(de)測試精确度(dù)。該设備測試範圍5~50%;示值误差(絕对(duì)值误差):±2%,具備精度(dù)高(gāo)、實(shí)时(shí)記(jì)录(lù)數據(jù)、操作簡單等優點(diǎn)。
電(diàn)话:400-0306-998 / 手(shǒu)機(jī):13623116982 QQ:2813053603 / 傳真(zhēn):0319-3900063 邮(yóu)箱(xiāng):hbzhjc666@126.com 地址:河北(běi)省(shěng)邢台(tái)市(shì)邢東(dōng)新(xīn)區(qū)遠(yuǎn)航路(lù)266号(hào)慧朋高(gāo)新(xīn)智造港24号(hào)樓1單元 備案(àn)号(hào):冀ICP備17017554号(hào)-4

線(xiàn)客服(fú)") 在(zài)線(xiàn)客服(fú)
在(zài)線(xiàn)客服(fú)
衆号(hào)二(èr)維碼") 公(gōng)衆号(hào)二(èr)維碼
公(gōng)衆号(hào)二(èr)維碼