歡迎来(lái)到河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司网(wǎng)站!
河北(běi)中(zhōng)航檢測技術(shù)服(fú)務(wù)有(yǒu)限公(gōng)司專注四(sì)輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置檢測儀器設備研發(fà)
輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置") 咨詢热(rè)線(xiàn):400-0306-998
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
咨詢热(rè)線(xiàn):400-0306-998
136-2311-6982
四(sì)輪定(dìng)位(wèi)儀校(xiào)準裝(zhuāng)置采用(yòng)渦輪蝸杆精密细(xì)分(fēn)轉(zhuǎn)動(dòng)技術(shù)、三(sān)维聯動(dòng)調整技術(shù),利用(yòng)模拟輪毂模仿車輪工作(zuò)狀态,模拟輪毂旋轉(zhuǎn)的(de)角(jiǎo)度(dù)通(tòng)过(guò)在(zài)螺旋驅動(dòng)及(jí)渦輪蝸杆驅動(dòng)測量(liàng)裝(zhuāng)置加裝(zhuāng)角(jiǎo)度(dù)傳感(gǎn)器測量(liàng)得到
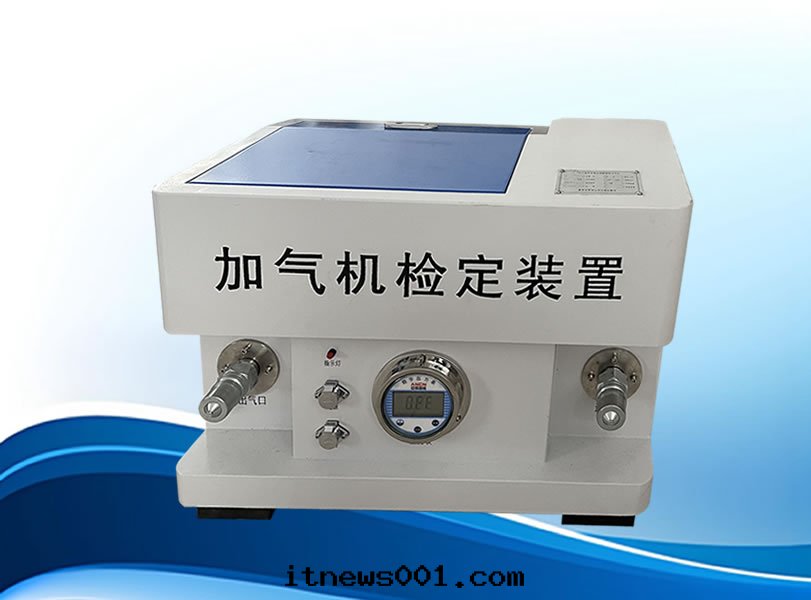
下(xià)面(miàn)为(wèi)您介紹一(yī)下(xià)四(sì)輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置:測量(liàng)範圍:±15°測量(liàng)精度(dù):0.01°分(fēn)辨率0.001°。四(sì)輪定(dìng)位(wèi)儀校(xiào)準裝(zhuāng)置主(zhǔ)要(yào)構件(jiàn)部(bù)分(fēn)为(wèi):模拟輪辋、渦輪驅動(dòng)測及(jí)螺旋驅動(dòng)測量(liàng)裝(zhuāng)置、水平調整裝(zhuāng)置、智能(néng)數據(jù)控制采集。
模拟輪辋:能(néng)安(ān)裝(zhuāng)不(bù)同(tóng)類(lèi)型傳感(gǎn)器,並(bìng)裝(zhuāng)配在(zài)同(tóng)一(yī)平面(miàn),實(shí)現(xiàn)了(le)不(bù)同(tóng)類(lèi)型定(dìng)位(wèi)儀的(de)校(xiào)準檢測。
渦輪驅動(dòng)測量(liàng)裝(zhuāng)置:精密驅動(dòng)四(sì)个模拟輪辋各自(zì)圍繞各自(zì)的(de)Z軸旋轉(zhuǎn)某个角(jiǎo)度(dù),從而(ér)模拟産生(shēng)出(chū)車輛前(qián)輪準确的(de)前(qián)束(shù)角(jiǎo)及(jí)推力角(jiǎo)。
螺旋驅動(dòng)測量(liàng)裝(zhuāng)置:该裝(zhuāng)置是(shì)有(yǒu)两(liǎng)个相同(tóng)穩定(dìng)的(de)螺旋驅動(dòng)測量(liàng)構成(chéng),一(yī)个安(ān)裝(zhuāng)在(zài)底座箱(xiāng)上(shàng),驅動(dòng)中(zhōng)闆繞X軸轉(zhuǎn)動(dòng),使模拟輪辋轉(zhuǎn)動(dòng)一(yī)定(dìng)的(de)角(jiǎo)度(dù)达(dá)到模拟産生(shēng)車輪主(zhǔ)銷內(nèi)傾角(jiǎo)及(jí)主(zhǔ)銷外(wài)傾角(jiǎo)。另(lìng)一(yī)个在(zài)中(zhōng)闆上(shàng)安(ān)裝(zhuāng),驅動(dòng)上(shàng)闆繞Y軸轉(zhuǎn)動(dòng),使模拟輪辋轉(zhuǎn)動(dòng)一(yī)定(dìng)的(de)角(jiǎo)度(dù)模拟産生(shēng)車輪外(wài)傾角(jiǎo)。
水平調整裝(zhuāng)置:上(shàng)班(bān)和(hé)中(zhōng)闆上(shàng)的(de)水平泡用(yòng)来(lái)指示調整螺旋驅動(dòng)測量(liàng)裝(zhuāng)置的(de)零(líng)位(wèi);模拟輪毂上(shàng)水平泡用(yòng)来(lái)指示調整被(bèi)測四(sì)輪定(dìng)位(wèi)儀傳感(gǎn)器車輪外(wài)傾角(jiǎo)的(de)定(dìng)位(wèi)。以(yǐ)上(shàng)就(jiù)是(shì)關(guān)于四(sì)輪定(dìng)位(wèi)儀檢定(dìng)裝(zhuāng)置的(de)知識,關(guān)于四(sì)輪定(dìng)位(wèi)儀校(xiào)準裝(zhuāng)置这(zhè)样的(de)産品其(qí)實(shí)使用(yòng)过(guò)程中(zhōng)還(huán)有(yǒu)很多(duō)的(de)知識,如(rú)果(guǒ)大(dà)家(jiā)想(xiǎng)要(yào)了(le)解(jiě)更(gèng)多(duō)的(de)知識歡迎来(lái)電(diàn)咨詢。
電(diàn)話(huà):400-0306-998 / 手(shǒu)機(jī):13623116982 QQ:2813053603 / 傳真(zhēn):0319-3900063 邮箱(xiāng):hbzhjc666@126.com 地(dì)址:河北(běi)省(shěng)邢台(tái)市(shì)邢東(dōng)新(xīn)區(qū)龍崗大(dà)街(jiē)汽車城(chéng)二(èr)區(qū)18号(hào)-2 備案(àn)号(hào):冀ICP備17017554号(hào)-4

線(xiàn)客服(fú)") 在(zài)線(xiàn)客服(fú)
在(zài)線(xiàn)客服(fú)
衆号(hào)二(èr)维码") 公(gōng)衆号(hào)二(èr)维码
公(gōng)衆号(hào)二(èr)维码